阻尼解释结构模型
论文写作或者计算需要帮助可发邮件到 hwstu # sohu.com 把 #替换成@,请说清来意,不必拐弯抹角,浪费相互之间的时间。
现实世界中,性质相反的两类属性是广泛存在的。即把模糊数的论域范围拓展到$[-1,1]$,在此论域范围内的解释结构模型称为阻尼解释结构模型。
$$
\begin{array} {c|c}{全称} & 英文全称& 简写 \\
\hline 不确定解释结构模型方法 &\color{red}{Uncertain \quad Interpretative \quad Structural \quad Modeling \quad Method} &\color{blue}{UISM} \\
\hline 阻尼解释结构模型方法 &\color{red}{Damp \quad Interpretative \quad Structural \quad Modeling \quad Method} &\color{blue}{DISM} \\
\hline 模糊解释结构模型方法 &\color{red}{Fuzzy \quad Interpretative \quad Structural \quad Modeling \quad Method} &\color{blue}{FISM} \\
\hline 解释结构模型方法 &\color{red}{Interpretative \quad Structural \quad Modeling \quad Method} &\color{blue}{ISM}\\
\hline \end{array}
$$
上述四者的关系: $ \color{blue}{ISM \subset } \color{blue}{FISM \subset } \color{red}{DISM } \color{blue}{\subset } \color{blue}{UISM} $
因素的关系为$[-1,1]$模糊性
2003年,黄炜在其论文《黑客与反黑客思维研究的方法论启示——解释结构模型新探》中首次提出了阻尼解释结构模型。
其核心原则是把要素之间的关系进行了拓展,从论域$[0,1]$拓展到了$[-1,1]$。
即把模糊性扩展到负数的区间。现实中也存在着基于负数的关系判断。如一粒老鼠屎破坏一锅粥,成事不足败事有余。在科研中有存在着大量的以毒攻毒的思路。而这种关系称之为破坏性的、阻挠性的关系。
阻尼关系是使得原因要素,可达要素之间产生性质相左的影响。比如抗震救灾要素,对于地震损失就是关系为负!
对于一个有向图,可以用一个$n×n$矩阵来表示。n为系统要素的个数。矩阵的每一行和每一列对应图中一个节点(系统要素)。并规定,要素$e_i$对$e_j$有正影响时,矩阵元素$a_{ij}$为正数、其值为对应的权值;要素$e_i$对$e_j$有负影响时,矩阵元素$a_{ij}$为负数、其值为对应的权值,其中负的性质可以用不同的颜色加以区分,或者在有向边上标注数值加以区分;要素$e_i$对$e_j$无影响时,矩阵元素$a_{ij}$为0。
阻尼矩阵中取值描述如下:
$$ a_{ij}= \begin{cases}
-x , \text{ $e_i$}\rightarrow \text{$e_j$ 有负影响} , x \in (0,1] \quad x的值为模糊测度值 \\
0, \text{ $e_i$}\rightarrow \text{$e_j \quad \quad 无影响$} \\
+x, \text{ $e_i$}\rightarrow \text{$e_j$ 有正影响} , x \in (0,1] \quad x的值为模糊测度值 \end{cases} $$
上述分段描述可简化为:$$ a_{ij}= x, \text{ $e_i$}\rightarrow \text{$e_j \quad \quad x \in$ [-1,+1]} \quad \quad x的值为模糊测度值 $$
模糊矩阵与阻尼矩阵:
阻尼矩阵是模糊矩阵的推广其核心是正负性质的表示
模糊矩阵的表达:$$
\require{AMScd}
\begin{CD}
X\\
@A \color{red}{-4}AA \\
Y\\
@A \color{blue}{5}AA\\
Z
\end{CD}
\Longleftrightarrow
\begin{array}
{c|c|c|c}
{M_{3 \times 3}}
& X & Y & Z \\
\hline
X & 0 & 0 & 0 \\
\hline
Y & \color{red}{-4} & 0 & 0 \\
\hline
Z & 0 & \color{blue}{5} & 0 \\
\hline
\end{array}
\Longleftrightarrow
\begin{array}
{c|c|c|c}
{M_{3 \times 3}}
& X & Y & Z \\
\hline
X & 0 & 0 & 0 \\
\hline
Y & \color{blue}{0.8} & 0 & 0 \\
\hline
Z & 0 & \color{blue}{1} & 0 \\
\hline
\end{array}
\Longleftrightarrow
\begin{CD}
X\\
@A A\color{blue}{0.8}A \\
Y\\
@A A \color{blue}{1}A\\
Z
\end{CD}
$$
阻尼矩阵的表达:$$
\require{AMScd}
\begin{CD}
X\\
@A \color{red}{-4}AA \\
Y\\
@A \color{blue}{5}AA\\
Z
\end{CD}
\Longleftrightarrow
\begin{array}
{c|c|c|c}
{M_{3 \times 3}}
& X & Y & Z \\
\hline
X & 0 & 0 & 0 \\
\hline
Y & \color{red}{-4} & 0 & 0 \\
\hline
Z & 0 & \color{blue}{5} & 0 \\
\hline
\end{array}
\Longleftrightarrow
\begin{array}
{c|c|c|c}
{M_{3 \times 3}}
& X & Y & Z \\
\hline
X & 0 & 0 & 0 \\
\hline
Y & \color{red}{-0.8} & 0 & 0 \\
\hline
Z & 0 & \color{blue}{1} & 0 \\
\hline
\end{array}
\Longleftrightarrow
\begin{CD}
X\\
@A A\color{red}{-0.8}A \\
Y\\
@A A \color{blue}{1}A\\
Z
\end{CD}
$$
阻尼算子
阻尼算子是模糊算子的推广,其核心依然是乘、加两个算子
广义的阻尼算子对有无穷多种,具体的可以参考距离、相似度、范数的例子。把距离带上方向即可。
直觉模糊算子的推广直觉阻尼算子对
阻尼加$$
\beta 1+\beta 2=
\begin{cases}
\beta 1+\beta 2, (当: -1 < \beta 1+\beta 2 < 1 , \beta 1 , \beta 2 \in [-1,1] ) \\
1 \quad , \quad \quad(当: \beta 1+\beta 2 \ge 1 , \beta 1 , \beta 2 \in [-1,1] ) \\
-1 , \quad \quad(当: \beta 1+\beta 2 \leq -1 , \beta 1 , \beta 2 \in [-1,1] ) \\
\end{cases}
$$
阻尼乘$$
\beta 1 \beta 2= \beta 1 \beta 2, ( \beta 1 , \beta 2 \in [-1,1] ) \\
$$
阻尼可达矩阵
设:原始阻尼矩阵$\tilde A$ 单位矩阵为$I$
$\tilde B=\tilde A +I$
当:$ \tilde B^{(k-1)}≠\tilde B^{k}=\tilde B^{(k+1)}= \tilde R$
$\tilde R$称为阻尼可达矩阵
$\tilde B$具有如下形式:
$$
\begin{array}
{c|c|c|c|c|c|c|c}{ \tilde B_{n \times n}} &1 &2 &{\cdots} &n \\
\hline 1 & \color{blue}{1}&{b_{12}}&{\cdots}&{b_{1n}}\\
\hline 2 & {b_{21}}&\color{blue}{1}&{\cdots}&{b_{2n}}\\
\hline {\vdots} &{\vdots}&{\vdots}&\color{blue}{1}&{\vdots}\\
\hline n & {b_{n1}}&{b_{n2}}&{\cdots}&\color{blue}{1}\\
\hline \end{array}
$$
设:$\tilde C = \tilde B \times \tilde B $
$ \tilde C=\left[ c_{ij} \right]_{n \times n} \quad \tilde B=\left[ b_{ij} \right]_{n \times n}$
$$
\begin{equation}\begin{split}
c_{ij}&=\sum_{k=1}^n b_{ik}\odot b_{kj} \\
&=(b_{i1} \odot b_{1j}) \oplus (b_{i2} \odot b_{2j}) \oplus (b_{i3} \odot b_{3j}) \cdots \oplus \cdots(b_{in} \odot b_{nj})\\
\end{split}\end{equation}
$$
其中$ \odot 为阻尼乘算子 $
其中$ \oplus 为阻尼加算子 $
对于任意$c_{ij}$不具有单调递增的特性,故阻尼可达矩阵不一定存在。当阻尼可达矩阵不存在时候,连乘下去具有周期的振荡性。
简单的判断可以如下方式进行,对于阻尼矩阵我们先取其极限来判断。很显然-1可以看成是一个矩阵值。对于$(-1)^k$来说不会出现确定值。它是在-1和1之间震荡。呈现有周期性。
DISM方法即Damp Interpretative Structural Modeling Method 中的Damp一词来自阻尼振动。把阻尼振动跟简谐振动合并在一起看,简谐振动就是阻尼振动的一个特例。把整个振动的过程看成求阻尼可达矩阵的过程,可以知道普通的阻尼振动会趋近于静止即处于阻尼可达矩阵的状态。而简谐振动则是一直呈现周期性的运动。即没有阻尼可达矩阵。
手性对称矩阵与手性拆分
手性对称矩阵: 手性一词来自于化学异构体的概念。即外形上看具有类似左手跟右手一样的镜面对称关系的立体几何体。
$$
D=\begin{array} {c|c|c|c}{M_{3 \times3}} & A & B & C\\
\hline A &0 &\color{red}{-1} &0\\
\hline B &0 &0 &\color{blue}{1}\\
\hline C &0 &0 &0\\
\hline \end{array}
$$
手性对称矩阵如下
$$
\begin{array} {c|ccc|ccc}{M_{6 \times6}} & +A &+B &+C &-A &-B &-C\\
\hline
+A &0 &0 &0 &0 &\color{red}{1} &0\\
+B &0 &0 &\color{blue}{1} &0 &0 & 0\\
+C &0 &0 &0 &0 &0 &0\\
\hline
-A &0 &\color{red}{1} &0 &0 &0 &0\\
-B &0 &0 &0 &0 &0 &\color{blue}{1}\\
-C &0 &0 &0 &0 &0 &0\\
\hline \end{array}
$$
手性对称矩阵的特点
1、拓扑对称图,矩阵为沿着对角线的对称矩阵。
2、设任意两节点 $(v1,v2)$ 如果存在一个连通域点 $(+v1,-v1,+v2)$ 则 $(+v1,v1,+v2, -v2)$ 必定为同一个连通域。
推论1:有连通域 $(+v1,-v1,+v2,-v3,+v4,{\cdots} -vn)$则 $(+v1,-v1,+v2,-v2,+v3,-v3,+v4,-v4{\cdots} +vn,-vn)$ 必定为同一连通域
推论2:有连通域 $(-v1,+v2,-v3,+v4,{\cdots} -vn)$则 $(+v1,-v2,+v3,-v4{\cdots} +vn)$ 必定为另外一个镜像的连通域
手性拆分
从可能性上考虑,存在着保利不相容原理。保利不相容原理的基本描述为:同一轨道内的电子自旋方向相反。扩大该含义即一件事情发生了,必然对应着某件事情不发生。
因此对于连通域$(+v1,-v1,+v2,-v2,+v3,-v3,+v4,-v4{\cdots} +vn,-vn)$ 中任意成对节点${+vx,-vx}$只能取一个值。
取出的节点构成一个系统即为手性拆分矩阵。
$DISM \Longrightarrow ISM $ 步骤
ISM中的矩阵对应的为布尔矩阵。即要把阻尼矩阵中的的值通过一系列转化变成布尔值,而该布尔矩阵最终得到为一个手性拆分后的矩阵。
方法一:
阻尼矩阵 $\tilde D$ 如下:
$$
\tilde D=\begin{array} {c|c|c|c}{M_{3 \times3}} & a & b & c & d\\
\hline a &0 &\color{red}{-0.9} &0 &0\\
\hline b & \color{red}{-0.5}&0 &\color{blue}{0.8}&0\\
\hline c &0 &0 &0 &0\\
\hline d &0 &\color{blue}{0.9} &0 &0\\
\hline \end{array}
$$
阻尼矩阵 $\tilde D$ 通常有取值的符号沿着对角线是对称的。 值为0时看成任意的正负号。
阻尼矩阵 $\tilde D$ 转化成 模糊矩阵 $\tilde F$ 可以取绝对值获得。
$$
\tilde F=\begin{array} {c|c|c|c}{M_{3 \times3}} & a & b & c & d\\
\hline a &0 &\color{blue}{0.9} &0 &0\\
\hline b & \color{blue}{0.5}&0 &\color{blue}{0.8}&0\\
\hline c &0 &0 &0 &0\\
\hline d &0 &\color{blue}{0.9} &0 &0\\
\hline \end{array}
$$
模糊矩阵 $\tilde F$ 选择对应的算子求出模糊可达矩阵 $\tilde R$
$$
\tilde R=\begin{array} {c|c|c}{M_{4 \times4}} &a &b &c &d\\
\hline a &1 &0.9 &0.8 &0\\
\hline b &0.5 &1 &0.8 &0\\
\hline c &0 &0 &1 &0\\
\hline d &0.5 &0.9 &0.8 &1\\
\hline \end{array}
$$
$$
阈值集合\ddot \Delta = (0.5, 0.8, 0.9, 1)
$$
由阈值集合对模糊可达矩阵 $\tilde R$ 得到截距阵的骨架矩阵并求出层级图。
截距 $\lambda$ = 0.5 得如下矩阵
$$R_{0.5} =\begin{array} {c|c|c}{M_{4 \times4}} &a &b &c &d\\
\hline a &1 &1 &1 &0\\
\hline b &1 &1 &1 &0\\
\hline c &0 &0 &1 &0\\
\hline d &1 &1 &1 &1\\
\hline \end{array}
\Longrightarrow
S_{0.5}=\begin{array} {c|c|c|c|c|c|c|c}{M_{4 \times4}} &a &b &c &d\\
\hline a &0 &1 &0 &0\\
\hline b &1 &0 &1 &0\\
\hline c &0 &0 &0 &0\\
\hline d &1 &0 &0 &0\\
\hline \end{array}
\Longrightarrow
骨架矩阵S_{0.5}=\begin{array} {c|c|c|c|c|c|c|c}{M_{3 \times 3}} &a +b &c &d\\
\hline a+b &0 &1 &0 \\
\hline c &0 &0 &0 \\
\hline d &1 &0 &0 \\
\hline \end{array}
$$
上述即为ISM的层级图框架。
对于要素的正负 需要从原因要素即下层要素给出初始判断,根据性质层层往上计算得出。具体计算请看方法二。
方法二:
阻尼矩阵 $\tilde D$ 如下:
$$
\tilde D=\begin{array} {c|c|c|c}{M_{3 \times3}} & a & b & c & d\\
\hline a &0 &\color{red}{-0.9} &0 &0\\
\hline b & \color{red}{-0.5}&0 &\color{blue}{0.8}&0\\
\hline c &0 &0 &0 &0\\
\hline d &0 &\color{blue}{0.9} &0 &0\\
\hline \end{array}
$$
阻尼矩阵 $\tilde D$ 转化成 手性对称的模糊矩阵 $ \tilde Fhand $
$$ \tilde f_{ij}=
\begin{cases}
\tilde f_{(-i)(+j)}=|\tilde d_{ij}| 且 \tilde f_{(+i)(-j)}=|\tilde d_{ij}| , \tilde d_{ij}< 0 \\
\tilde f_{(-i)(-j)}=|\tilde d_{ij}| 且 \tilde f_{(+i)(+j)}=|\tilde d_{ij}| , \tilde d_{ij}> 0
\end{cases}
$$
$$
\tilde Fhand =
\begin{array} {c|cccc|cccc}{M_{8 \times8}} & +a &+b &+c &+d &-a &-b &-c &-d\\
\hline
+a &0 &0 &0 &0 &0 &0.9 &0 &0 \\
+b &0 &0 &0.8 &0 &0.5 &0 &0 &0 \\
+c &0 &0 &0 &0 &0 &0 &0 &0\\
+d &0 &0.9 &0 &0 &0 &0 &0 &0\\
\hline
-a &0 &0.9 &0 &0 &0 &0 &0 &0 \\
-b &0.5 &0 &0 &0 &0 &0 &0.8 &0 \\
-c &0 &0 &0 &0 &0 &0 &0 &0\\
-d &0 &0 &0 &0 &0 &0.9 &0 &0\\
\hline \end{array}
$$
上述矩阵为模糊矩阵,根据FISM方法求出如下结构截距 $\lambda$ = 0.5
截距 $\lambda$ = 0.8
截距 $\lambda$ = 0.9
DISM讨论
DISM的推荐如下:
$$
\require{cancel}
\require{AMScd}
\begin{CD}
\tilde D=\left[ \tilde d_{ij} \right]_\color{blue}{n \times n}@>对称平移>> \tilde Fhand=\left[ \tilde f_{ij} \right]_\color{red}{2n \times 2n}@>截距阵>>R_{\lambda}=\left[ r_{ij} \right]_\color{red}{2n \times 2n}@>ISM方法>>最简层次化的菊花链@>如果层次图为未拆分手性图按照层级从下往下拆分>>ISM层级图 \\
\end{CD}
$$
讨论
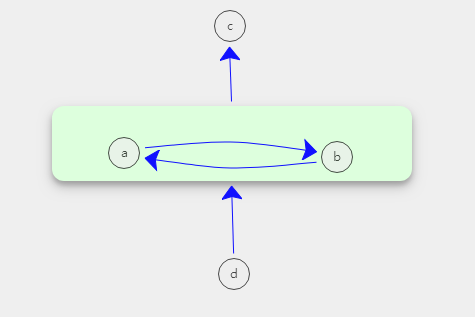
1、正负号的含义
在阻尼矩阵的值中存在着正负号,同时在手性矩阵要素的标识中存在。两者的关系如下图所表示。

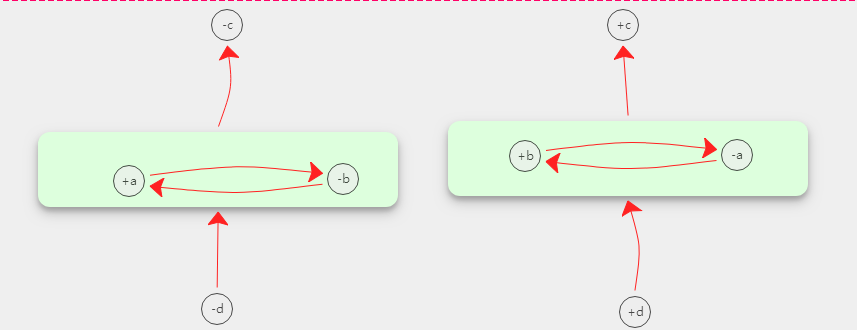
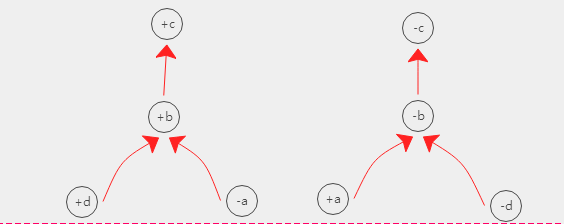
2、要素含义的解读
如下图,由食物链推导出的ISM
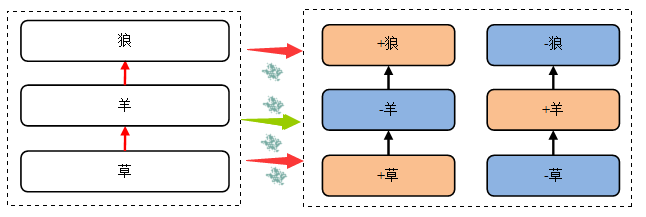
以狼为例:左边结构图中狼是名词,代表一种动物。 而右边的+狼与-狼是狼的一种属性,含义是某时刻狼的数量变化的方向。
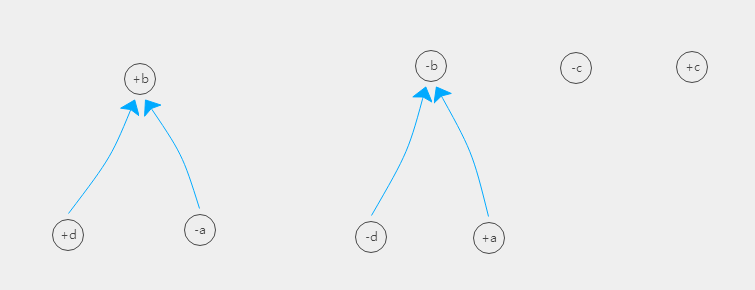
左图为食物链的ISM层级图。
右图为物种数量变化方向的ISM层级图。它是一个对称的两个不连通图组成。
3、对于没有拆分的结构,进行拆分时候,由下往上逐步进行
如需用到其它方法如:
模糊解释结构模型即FISM的建模过程,包括FISM中的模糊算子的选择、诸如查徳算子、有界算子、爱因斯坦算子等等计算结果以及解释。
解释结构模型与DEMATEL:( Decision Making Trial and Evaluation Laboratory,决策试验和评价实验室 )联合使用。
解释结构模型与AHP/ANP 即层次分析法/网络分析法 联用。
解释结构模型与灰色系统 联用。
与自组织结构模型 SOM 。
与机器学习包括BP网络
与博弈论
与深度学习等等
欢迎来邮件探讨,亦可开发相关内容。
对无毛定理有理解的尤其受欢迎
解释结构模型的高级运用,分子受力实时分析